德國、意大利、日本在制造業方面占據著獨特的優勢,其生產出來的減速器成品無論是在材料、設計水平、質量控制、精度,還是在功率密度、可靠性和使用壽命等領域都遙遙領先。2017年3月32日, HIT 機器人集團開發了一款完全自主知識產權的精密擺線減速器,并于2017年3月投入生產。采用新開發的減速器,機器人制造商的采購成本下降了 50%。
精密減速器具有傳動比大、精度高、承載能力大、效率高等特點,目前除機器人外,精密減速器還廣泛應用于航天、能源、電子、石油、軍工、儀器等行業。在航空、航天、機器人和醫療器械等發展的推動下,結構簡單緊湊、傳遞功率大、噪聲低、承載能力大、傳動平穩的高性能精密減速器需求加大。全世界工業機器人用的高精密減速器大部分是日本生產出來的,盡管近幾年來國內生產了減速器,但是很少被應用到國產機器人企業。分析機器人用減速器的精度將會大幅度提高國內減速器的生產質量和利用率,對減速器的發展具有推動作用。
1、精密減速器
在機械傳動領域,減速器是連接動力源和執行機構的中間裝置,減速器一般用于低轉速大扭矩的傳動設備,把電動機、內燃機或其他高速運轉的動力通過減速器輸入軸上的齒數少的齒輪嚙合輸出軸上的大齒輪來達到減速的目的。目前精密減速器主要有 RV 減速器 (RV Reducer) 、諧波行星減速器 (Harmonic Planetary Gears Reducer) 、住友減速器 (Sumitomo Reducer)。
RV 減速器
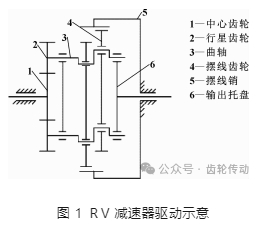
RV 減速器是一種新型的行星減速器,由環形齒輪、2K-H 行星傳動和 K-H-V 行星傳動復合成 2K-V 行星傳動。RV 減速器的工作原理如圖 1 所示,中心齒輪由電機帶動,行星齒輪由中心齒輪驅動。此時,中心齒輪以第二級減速的輸入速度反向旋轉。行星齒輪的轉速通過曲軸傳遞給擺線齒輪,擺線齒輪是偏心的。同時,擺線銷是嚙合的,使其繞中心軸旋轉,轉速從軸承兩端的曲軸傳遞到軸承座上,從而達到減速的目的。如果擺線針殼是固定的,則載體將是輸出構件。如果載體固定,擺線針殼將是輸出構件。
與其他行星傳動相比,RV 減速器具有以下優點: (1) 傳動比高、傳動效率高; (2) 承載能力強; (3) 體積小,質量輕; (4) 回程誤差小; (5) 使用壽命長。與諧波齒輪減速器相比,RV 減速器具有較高的疲勞強度和剛度。隨著工作時間的增加,返回的誤差不會增加。
我國 RV 減速器傳動裝置的研制是 1996 年在國家高技術研究開發計劃 (863 計劃) 中啟動的。通過對機器人RV 減速器系統的研究,提出了研制高精度、高剛度、小艙口 RV 減速器的基本方法,并成功地應用于 RV-250II 減速器的研制中。
諧波行星減速器
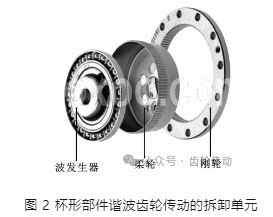
諧波行星減速器是一種少齒差行星傳動,通常由波發生器、柔輪、剛輪和柔性軸承等零部件構成。由 W C MUSSER 于 20 世紀 50 年代早期開發的典型驅動裝置由 3 個基本的同心部件組成: 剛性圓柱齒輪 G、柔性圓柱齒輪 R、波發生器 H (見圖 2) 。波發生器在橢圓狀凸輪外圈組裝薄壁軸承的部件,軸承的內輪固定在凸輪上,外輪可通過滾珠實現彈性變形,通常被安裝在輸入軸上。柔輪是薄壁杯形金屬彈性體部件,開口部外圈列有齒輪,柔輪底部 (杯形底部) 被稱為膜片部,通常被安裝在輸出軸上。而剛輪是剛性環狀部件,比柔輪齒數多出兩齒,通常被固定在機殼上。組裝時,將波發生器插入到柔性圓柱齒輪中,使柔性圓柱齒輪樣條曲線變為橢圓形狀。當所選的彎曲樣條曲線插入到剛性圓柱齒輪時,波發生器長軸兩端的齒嚙合,短軸的齒沿徑向運動提供花鍵之間的間隙。柔性圓柱齒輪和剛性圓柱齒輪總是連續嚙合,彎曲樣條曲線的形狀使得它比剛性圓柱齒輪少兩個齒,這就確保了波發生器不斷旋轉,使柔性圓柱齒輪和剛性圓柱齒輪之間的相對運動等于兩個齒的運動。在剛性圓柱齒輪旋轉固定的情況下,柔性圓柱齒輪以與輸入相反的方向旋轉,減速比等于柔性圓柱齒輪齒數的一半。
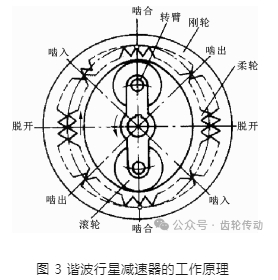
如圖 3 所示諧波行星減速器的工作原理: 諧波齒輪傳動中,剛輪的齒數 ZG 略大于柔輪的齒數 ZR,其齒數差要根據波發生器轉一周柔輪變形時與剛輪同時嚙合區域數目來決定,即 ZG-ZR = u,錯齒是運動產生的原因。波發生器的長度比未變形的柔輪內圓直徑大,當波發生器裝入柔輪內圓時,迫使柔輪產生彈性變形而呈橢圓狀,使其長軸處柔輪輪齒插入剛輪的輪齒槽內,成為完全嚙合狀態,而其短軸處兩輪輪齒完全不接觸,處于脫開狀態,由嚙合到脫開的過程之間則處于嚙出或嚙入狀態。當波發生器連續轉動時,迫使柔輪不斷產生變形,使兩輪輪齒在進入嚙入、嚙合、嚙出、脫開的過程中不斷改變各自的工作狀態,產生了所謂的錯齒運動,從而實現了主動波發生器與柔輪的運動傳遞。
諧波傳動具有單級減速比高、扭矩容量大、通用性強、幾乎無間隙、效率高、齒面磨損小、扭轉剛度高、沖擊精度高等優點,在高精度傳動機構和定點裝置中得到了廣泛的應用,諧波齒輪傳動因此在航空航天、軍事應用以及工業領域得到了廣泛的應用。
住友減速器
住友減速機的典型代表是精密擺線針輪減速器,其結構如圖 4、圖 5 所示。它主要由 1 個太陽齒輪 (輸入) 、3 個行星齒輪、1 個凸輪軸 (輸出) 、3 個曲軸、2 個擺線齒輪、若干個銷軸、1 個銷齒殼體等組成。傳動系統是兩級減速機構: 第一級為圓柱行星減速器,第二級為擺線行星減速器。行星齒輪和相應的曲軸作為擺線針輪傳動的輸入。在輸入軸上裝有一個錯位 180°的雙偏心套,在偏心套上裝有兩個滾柱軸承,兩個擺線輪的中心孔即為偏心套上轉臂軸承的滾道,并由擺線輪與針齒輪上一組環形排列的針齒相嚙合,以組成齒差為一齒的內嚙合減速機構。

擺線針輪減速器的傳動過程: 當輸入軸帶著偏心套轉動一周時,由于擺線輪上齒廓曲線的特點及其受針齒輪上針齒限制的緣故,擺線輪上的運動成為既有公轉又有自轉的平面運動,在輸入軸自轉一周時,偏心套亦轉動一周,擺線輪于相反方向轉過一個齒從而得到減速; 再借助輸出機構,將擺線輪的低速自轉運動通過銷軸傳遞給輸出軸,從而獲得較低的輸出轉速。
擺線針輪減速器的齒形是特殊的,因為它與在圓線上多個滾子的滾子齒輪嚙合,它可以被設計成接觸所有的輪齒和滾子,因此,該擺線針輪減速器具有良好的動態性能和零間隙特性,廣泛應用于石油、環保、化工、水泥、輸送、紡織、制藥、食品、印刷、起重、礦山、冶金、建筑、發電等行業。其獨特的平穩結構在許多情況下可替代普通圓柱齒輪減速器,因此,擺線針輪減速器在各個行業和領域被廣泛使用,受到廣大用戶的普遍歡迎。
2、精密減速器的精度研究進展
目前,高性能精密傳動元件及系統的研究是機械工程科學的關鍵技術之一,對減速器傳動精度的分析已成為一個重要的研究課題。為了提高減速器的傳動精度,必須嚴格控制傳動誤差。國內外學者對普通齒輪傳動精度進行了大量深入的研究,而 RV 減速器、諧波行星減速器、擺線針輪減速器的精度研究還不夠。為了提高系統輸出的精度和穩定性,有必要對 RV 減速器、諧波行星減速器、擺線針輪減速器的動態傳動誤差進行分析和研究,從而揭示其動力學行為對傳動精度本質的影響。
RV 減速器精度研究進展
對于 RV 減速器,為了達到精度高、可靠性高、使用壽命長的目的,必須嚴格控制 RV 減速器的精度問題。美國休斯公司 BLANCHE 和日本教授 HIDAKA 等對其進行了研究; 中國 RV 減速器系統驅動精度的研究起步較晚,大多是有限幾何或靜態方法。隨著一些學者的深入研究,RV 減速器精度研究有了新的進展。
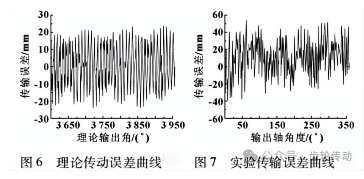
RV 減速器結構復雜、零件較多。HE 和 SHAN基于集中質量法和動力子結構法,建立了 RV 減速器的等效模型。集中質量法又稱質量彈簧法,即大質量、大慣性和小彈性的部分可以看作是粒子和剛體的質量集中,小質量、高彈性和大阻尼的部分可以看作是彈性元件或阻尼元件,其質量可以忽略不計。動態子結構法是將復雜結構分解為若干簡單的子結構,然后根據各子結構之間的關系,分析各子結構的模型,將子結構的分析模型集成到整個結構的分析模型中。整體過程,即為整體到局部再到整體的分析過程。在分析誤差因素對 RV 減速器傳動精度的影響時,在考慮了太陽齒輪加工偏心誤差、太陽齒輪的裝配誤差、行星齒輪的加工偏心誤差、曲軸偏心凸輪的偏心誤差、行星齒輪架曲軸孔的偏心誤差、曲軸孔的偏心誤差、行星齒輪架的偏心誤差、銷的輪廓偏差、齒距累積誤差、擺線齒廓偏差、等距離修正量、移動距離修正量等誤差的基礎上,通過牛頓第二定律對各主要部件在理想位置的受力分析,建立了動態傳動精度的數學模型。用龍格-庫塔法求解方程組,用試驗臺測量實際傳動誤差。數值計算和實驗結果分別如圖 6 和圖 7 所示。
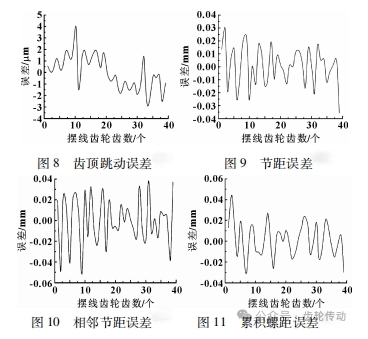
根據減速器用擺線齒輪在制造和測量過程中存在的問題,用三坐標測量儀測繪得到的擺線齒輪齒廓坐標與理論上設計的齒廓坐標不一致,很難準確地獲取齒頂高和齒根高。ZHANG 等在獲取擺線齒輪齒廓 坐標點的基礎上,首先通過計算和比較各點的徑向半徑,找出 39 個近似加數,將整個掃描點按 39 個近似加數分成 39 組,每組包括一個完整的單齒廓; 然后,在每個剖面點組內插直線,通過擬合和重新計算徑向半徑精確計算加數和齒根,用 39 個加數建立測繪剖面坐標系,通過坐標變換,用新坐標系標定測繪剖面坐標系; 最后計算了齒廓頂部和根部的徑向跳動誤差、節距誤差、相鄰節距誤差和累積節距誤差以及其他制造誤差,如圖 8—圖 11 所示。
綜上所述,對于 RV 減速器精度研究主要集中在動態傳動精度分析以及制造誤差分析,在實現長壽命、高可靠性的前提下,通過傳動誤差數學模型和擺線齒輪廓線進行優化,進而明顯提高 RV 減速器精度。
諧波行星減速器精度研究進展
諧波行星減速器由于其優異的物理和動態特性,在高性能和精密伺服機構中得到越來越多的應用。然而,所有諧波行星減速器都表現出不希望出現的非線性運動誤差,控制和補償這種誤差的能力僅限于獲得適當的準確度和連續性。所有諧波行星減速器都表現出一定程度的運動誤差,這被定義為測量或實際輸出位置與理論輸出位置之間的差異。
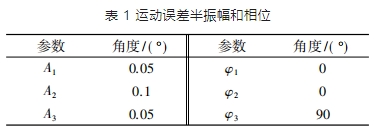
諧波行星減速器的傳動特性對系統整體性能的影響的貢獻是由 TUTTLE 和 SEERING所做的,試驗觀察表明制造商報告的運動誤差具有周期性,響應曲線的扭矩不可預測。通過對常見傳動特性的分離和試驗,給出了運動誤差和齒輪齒形的數學關系。他們試圖在諧波驅動下將這些傳輸屬性中的每一個定位在合適的位置,以便更容易地推導出運動的動力學方程。由 TUTTLE 在方程式 (1) 中給出的數學關系,并使用表 1 中的變量生成圖 12,與 NYE 和 KRAML獲得的實驗誤差具有顯著的相似性。
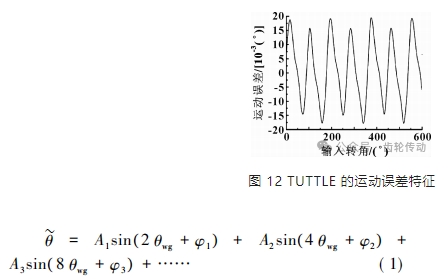
式中:![]() 為位置誤差; Ai 為半幅諧波,i = 1,2,......; θwg為波發生器轉角; φi 為每個諧波的相位,i = 1, 2,......。
為位置誤差; Ai 為半幅諧波,i = 1,2,......; θwg為波發生器轉角; φi 為每個諧波的相位,i = 1, 2,......。
HSIA和李召華等的研究都表明:諧波行星減速器運動誤差的來源是由于彎曲樣條曲線的變形形成了波發生器的形狀,而波發生器的橢圓幾何可能是諧波齒輪傳動輸出角位置誤差周期性的來源。幾何分析表明位置誤差取決于波發生器表面的曲率。根據方程 (2)和表 2,誤差的周期性性質如圖 13 所示。
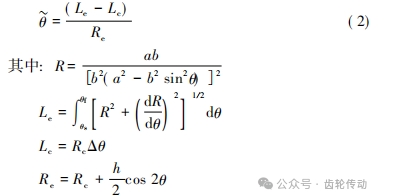
式中: a、b 分別為柔輪的半長軸和半短軸的長度; θs、θf 分別為波發生器的開始和結束位置; h 為齒高。
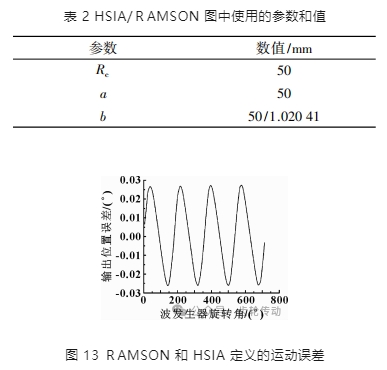
綜上可以看出: 不同方法的誤差特征,顯示了誤差幅度的正弦性及其對波的產生和旋轉的依賴性。從圖 13 中,可以用一個簡單的正弦波來定義幾何上確定的誤差,盡管用于推導其輪廓的數學方程很復雜,但通過對實驗數據進行傅里葉變換得到的關系式顯示出一些相似性。在理論和實驗結果之間,圖 12 中的曲線比圖 13 中的曲線更接近真實的運動誤差。
擺線針輪減速器精度研究進展
已經由許多研究者圍繞著不同的主題展開擺線針輪減速器的研究,例如輪廓生成、無底切制造標準、運動誤差和齒隙分析、力分析、新機構的開發和動態性能,但是其精度問題仍是許多學者研究的焦點。
韓林山采用 Sobol 方法對 RV 型針擺行星傳動精度進行了全局敏感性分析。在傳動系統中,由于制造誤差、齒隙、軸承間隙等原因,零件的實際形心偏離理想位置,從而形成傳動誤差。在擺線針輪減速器驅動中,將托架作為輸出軸。假設輸入軸 ( 即太陽齒輪) 均勻轉動,轉動角度為 0,輸出軸 (即托架) 實際轉動角度為 0,速比為 i,其動力學模型如圖 14 所示。
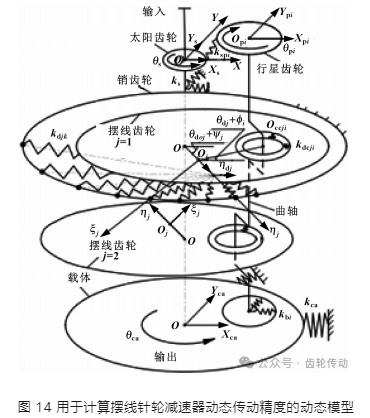
在該模型中,用彈簧代替支承 (軸承或軸) 和零件間的嚙合剛度。例如,太陽齒輪與行星齒輪之間嚙合剛度為 kspi,擺線齒輪與曲柄軸之間軸承支承剛度為 kdcji,齒輪與曲柄軸之間軸承支承剛度為 kbi,齒輪與銷齒殼之間軸承支承剛度為 kca,擺線齒輪和銷齒之間的嚙合剛度為 kdjk,太陽齒輪的支承剛度為 ks。剛度系數符號上的下標 i、j 和 k 分別表示曲軸 (或與曲軸或行星相關的孔) 、擺線齒輪、銷齒。其中: kdcji、kbi、kca 和 kdjk 主要是根據零件的材料由 Palmgren 公式確定的; kspi 由輪齒彎曲變形決定; ks 由太陽齒輪軸彎曲變形決定。通過對作用于任意位置各部分力的分析,建立了基于達朗伯原理的系統動力傳遞精度數學模型。根據參考文獻中的結果,由于二級傳動中的速比大于一級傳動,因此一級傳動中的傳動誤差對傳動精度影響很小。二級傳動中,結合其結構和技術特點,只考慮主要誤差,即曲軸偏心凸輪的跳動誤差、曲軸擺線齒輪孔的跳動誤差、擺線齒輪和曲軸的軸承間隙、齒槽誤差、曲軸托架孔跳動誤差、載體裝配誤差、托架和機架之間的軸承間隙。根據上述誤差類型,采用 Sobol 方法對RV 型擺線針輪傳動精度進行了靈敏度分析。結果表明: 曲軸偏心凸輪的跳動誤差、擺線齒輪的齒槽誤差和齒距累積誤差、擺線齒輪與曲軸的軸承間隙、銷齒輪的齒槽誤差和齒距累積誤差對傳動精度、擺線齒輪孔的跳動誤差影響較大。曲柄軸處及曲柄軸上托孔的跳動誤差對傳動精度、載體裝配誤差、載體與機架之間的軸承間隙等對傳動精度影響不大。因此,在研制高精度擺線針輪減速器時,主要誤差因素應通過制造高精度來調整,即曲軸偏心凸輪的跳動誤差、擺線齒輪的齒槽誤差和齒距累積誤差、擺線齒輪與曲軸的軸承間隙和齒槽誤差。銷軸齒輪的節距誤差和微小誤差因素應按一般制造精度進行調整,這樣可以降低制造成本。
LIN 等利用蒙特卡羅方法建立了一個計算機輔助程序,分析了誤差分布和制造參數已知時的運動誤差分布。他們認為由于最大運動誤差與公差參數之間不存在閉合關系,因此采用了數值方法分析銷軸半徑、銷軸位置 (徑向和軸向)、齒廓、螺距、曲軸偏心距與誤差之間的關系,如圖 15—圖 19 所示。
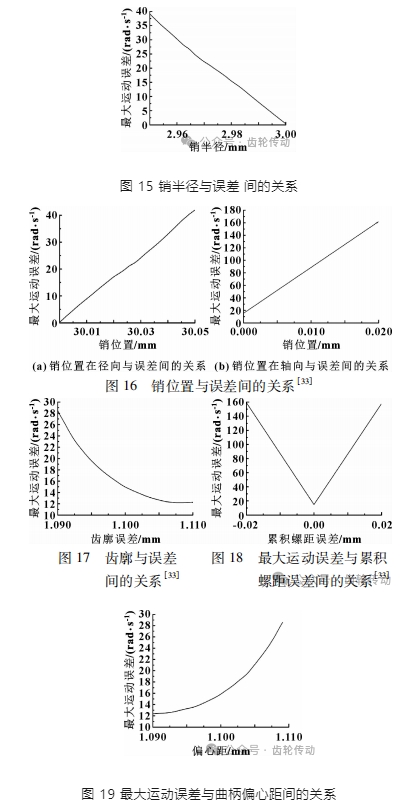
綜上可以看出:主要從設計參數上分析了擺線針輪減速器對其精度的影響,因此可通過學者們的研究對各個設計參數進行優化,從而大幅度提高減速器的精度。
3、機器人用減速器發展趨勢
減速器有諸多優點,例如,結構比較緊湊、精度較高、使用壽命很長、額定輸出扭矩可以做得很大、剛度大、承載能力強。目前,精密減速器的市場需求主要包括以下兩個方面:
(1) 提高已有減速器的性能。減速器的種類繁多,但從長久來看,由于機器人對傳動精度、自身質量以及工作效率等方面需求較大,所以使得一些減速器在特殊的場合達不到要求。因此,人們通過改進加工方法、更換新型齒形、研究新的設計理論和設計方法以及尋找新型材料來提高傳動精度、減輕自重和延長使用壽命。
(2) 研制新型減速器。雖然減速器的種類有數十種,但是沒有哪一個減速器能夠適用于各個場合,因此根據每個減速器的優點來研發新的減速器是大勢所趨。
4、結語
從類型和研究進展兩個方面介紹了機器人用精密減速器,針對精密減速器測量和分析精度以及如何提高精度還是具有一定的局限性。除此之外,研究更高性能、更高精度的新型減速器是亟待解決的關鍵問題,也是科研工作者面臨的挑戰。但是通過上述問題的不斷深入研究,必將對我國機器人用精密減速器的精度、性能以及新品種的研制起到巨大的推動作用。
參考文獻略.