摘要:文章以小齒輪電動(dòng)助力轉(zhuǎn)向(P-EPS)系統(tǒng)為對(duì)象,目前電動(dòng)助力轉(zhuǎn)向系統(tǒng)的建模與仿真研究多是建立在數(shù)學(xué)模型上,與實(shí)際模型相比,數(shù)學(xué)模型往往忽略了實(shí)際參數(shù)影響與實(shí)際系統(tǒng)有較大偏差。結(jié)合目前電動(dòng)轉(zhuǎn)向系統(tǒng)控制策略已有研究基礎(chǔ),采用 AMESim 半物理仿真軟件建立了 P-EPS 系統(tǒng)的物理模型,并提出一種適合該系統(tǒng)的三控制兩補(bǔ)償?shù)目刂撇呗裕Y(jié)合所搭建半物理模型進(jìn)行了仿真研究,驗(yàn)證了其正確性和可行性。結(jié)果表明,應(yīng)用 AMESim 搭建的 P-EPS 控制性能效果良好且易于實(shí)現(xiàn),為 P-EPS 控制策略的進(jìn)一步開發(fā)提供了參考依據(jù)。
隨著汽車技術(shù)的發(fā)展和電力電子器件技術(shù)的成熟,電動(dòng)助力轉(zhuǎn)向系統(tǒng)作為現(xiàn)代汽車的關(guān)鍵技術(shù)之一受到越來越多的關(guān)注。小齒輪電動(dòng)助力轉(zhuǎn)向(Pinion Electric Power Steering, P-EPS)系統(tǒng)以其結(jié)構(gòu)緊湊、響應(yīng)迅速、助力效果好等優(yōu)點(diǎn),在車輛中得到了廣泛應(yīng)用,然而,P-EPS 的性能受到多種因素的影響,如:車速、方向盤轉(zhuǎn)角、駕駛員力矩等,因此,搭建適合的仿真模型來研究 P-EPS 有效控制策略,對(duì)于提高系統(tǒng)的性能至關(guān)重要。AMESim 作為一款強(qiáng)大的工程系統(tǒng)仿真軟件,建模過程中用戶不需要去推導(dǎo)復(fù)雜的數(shù)學(xué)模型,通過軟件內(nèi)包含多種基本元素結(jié)合實(shí)際物理系統(tǒng)搭建自定義仿真模型即可,為 P-EPS 仿真建模和控制策略研究提供了有力的工具。
陳迎燕等利用 MATLAB/Simulink 構(gòu)造了 EPS 仿真模型,采用了模糊比例-積分-微分(Proportional-Integral-Derivative, PID)自整定助力電流控制策略,提高了操控靈活性。劉小云等針對(duì)車輛行駛跑偏問題,提出了電動(dòng)助力轉(zhuǎn)向拉拽補(bǔ)償對(duì)跑偏的優(yōu)化方法并行了效果測(cè)試。商顯赫等結(jié)合 CarSim 和 MATLAB/Simulink 建立整車聯(lián)合模型進(jìn)行仿真,通過和傳統(tǒng) PID 控制策略對(duì)比,在響應(yīng)速度和超調(diào)量方面實(shí)現(xiàn)了更好的控制效果。本文采用 AMESim 搭建了 P-EPS 系統(tǒng)的仿真模型,設(shè)計(jì)了一種三控制兩補(bǔ)償?shù)目刂撇呗圆⑦M(jìn)行了仿真試驗(yàn),控制策略效果驗(yàn)證了其正確性和有效性。
1、P-EPS 系統(tǒng)和仿真模型
P-EPS 系統(tǒng)工作原理
電動(dòng)助力轉(zhuǎn)向(EPS)系統(tǒng)通過電機(jī)提供轉(zhuǎn)向輔助動(dòng)力,電子控制單元(Electronic Control Unit, ECU)根據(jù)車速和駕駛員施加在轉(zhuǎn)向盤上的力計(jì)算出目標(biāo)輔助力矩,通過電流直流指令給到助力 電機(jī)輸出力矩,使得 EPS 系統(tǒng)實(shí)現(xiàn)低速轉(zhuǎn)向輕便性,保證高速轉(zhuǎn)向穩(wěn)定性。P-EPS 系統(tǒng)是一種電機(jī)及減速器與轉(zhuǎn)向器上的小齒輪相連接的 EPS 系統(tǒng),由機(jī)械和電子兩部分組成。機(jī)械部分包括轉(zhuǎn)向盤、轉(zhuǎn)向軸、扭桿、減速增扭的渦輪蝸桿機(jī)構(gòu)、帶動(dòng)車輪偏轉(zhuǎn)的齒輪齒條機(jī)構(gòu)等,電子部分由 ECU、助力電機(jī)、車速傳感器、角度傳感器、扭矩傳感器等組成。其簡(jiǎn)化結(jié)構(gòu)圖如圖 1 所示。

AMESim 仿真模型與調(diào)試
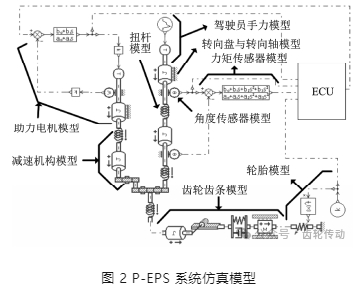
AMESim 是專門為流體(液體及氣體)、機(jī)械、控制、電磁等工程系統(tǒng)開發(fā)的一款較完善的綜合仿真環(huán)境,具有完善的機(jī)械、電機(jī)和控制信號(hào)元件庫(kù)。針對(duì) P-EPS 系統(tǒng)結(jié)構(gòu)組成和 AMESim 軟件中的已有元件搭建了合適的 P-EPS 系統(tǒng)仿真模型,如圖 2 所示。
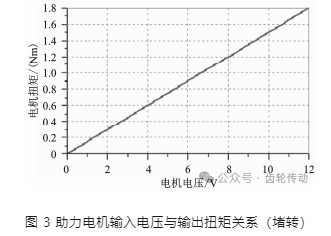
為驗(yàn)證所搭建模型的正確性,分別選取模型的機(jī)械部分中齒條齒條機(jī)構(gòu)和電子部分中助力電機(jī)進(jìn)行測(cè)試。當(dāng)電機(jī)堵轉(zhuǎn)時(shí),隨著助力電機(jī)輸入電壓變化輸出扭矩也隨之改變,輸入與輸出基本呈現(xiàn)正相關(guān)關(guān)系,檢測(cè)電機(jī)電壓與扭矩關(guān)系如圖 3 所示,測(cè)試結(jié)果與實(shí)際情況相符。
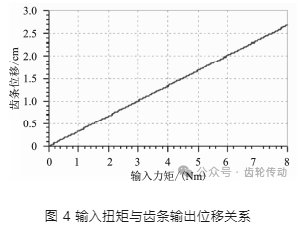
通過轉(zhuǎn)向盤與轉(zhuǎn)向軸模型輸入線性扭矩,在無其他外界輸入情況下檢測(cè)齒輪齒條位移與輸入扭矩關(guān)系如圖 4 所示,測(cè)試結(jié)果表明齒條輸出位移隨輸入扭矩正比例增大,考慮轉(zhuǎn)動(dòng)慣量與摩擦因數(shù)影響,輸入扭矩與齒條輸出位移和實(shí)際情況基本相當(dāng)。
2、P-EPS 控制策略的設(shè)計(jì)
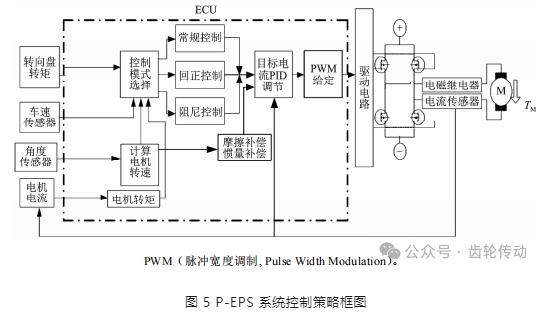
汽車助力轉(zhuǎn)向系統(tǒng)輔助駕駛員在不同車速下控制車輛運(yùn)動(dòng)方向,傳遞不同路況和車速條件下的路感信息,設(shè)計(jì)良好的控制策略是體現(xiàn) P-EPS 性能的關(guān)鍵因素。P-EPS 系統(tǒng)目標(biāo)是根據(jù)車輛速度、轉(zhuǎn)向盤力矩大小、轉(zhuǎn)向機(jī)角度變化快慢等輸入信號(hào)不同,控制助力電機(jī)輸出準(zhǔn)確的扭矩,實(shí)現(xiàn)車輛轉(zhuǎn)向的舒適、穩(wěn)定和安全。P-EPS 的控制對(duì)象為助力電機(jī)的扭矩輸出,而電機(jī)所輸出電磁轉(zhuǎn)矩的大小與電樞電流成正比,因此,助力電機(jī)轉(zhuǎn)向扭矩的控制實(shí)際為電機(jī)目標(biāo)電流控制,包括常規(guī)助力控制、主動(dòng)回正控制和阻尼補(bǔ)償控制。
為減小助力電機(jī)目標(biāo)電流和實(shí)際工作電流誤差,提高系統(tǒng)穩(wěn)定性和響應(yīng)速度,控制電流采用增量式 PDI 閉環(huán)電流前饋控制,考慮實(shí)際轉(zhuǎn)向時(shí)的轉(zhuǎn)動(dòng)慣量和摩擦因數(shù),助力電機(jī)目標(biāo)電流前饋補(bǔ)償分別為轉(zhuǎn)動(dòng)慣量補(bǔ)償電流和摩擦補(bǔ)償電流,通過電流反饋能夠?qū)崿F(xiàn)助力電機(jī)依據(jù)助力特性連續(xù)穩(wěn)定出力,改善電機(jī)響應(yīng)速度,使得助力電機(jī)平穩(wěn)助力,保持穩(wěn)定回正。綜合 P-EPS 工作原理及所設(shè)計(jì)的三種控制兩種補(bǔ)償?shù)目刂撇呗裕琍-EPS 控制框圖如圖 5 所示。
3、控制策略仿真及結(jié)果分析
在所搭建的 P-EPS 仿真模型的基礎(chǔ)上,對(duì)所提出的控制策略進(jìn)行仿真研究。車輛轉(zhuǎn)向助力實(shí)際控制過程中存在很多非線性因素,例如路況、負(fù)載擾動(dòng)、駕駛習(xí)慣差異等因素影響。基于 AMESim 仿真模型研究與測(cè)試結(jié)果與實(shí)際的真實(shí)情況會(huì)存在部分誤差,但仿真研究成本低速度快且可實(shí)施性強(qiáng),對(duì)于實(shí)際試驗(yàn)提供了借鑒和參考價(jià)值。
常規(guī)助力控制
常規(guī)助力控制是車輛轉(zhuǎn)向過程中的基本控制模式,助力電機(jī)輸出的助力扭矩是通過助力特性曲線來確定的。助力特性曲線將車速、轉(zhuǎn)向盤轉(zhuǎn)矩大小和電機(jī)輸出扭矩的關(guān)系表示出來,由于電機(jī)輸出扭矩大小與電機(jī)輸入電流有一定關(guān)系,且隨著車速變化也隨之發(fā)生變化,因此,采用電機(jī)電流與車速、轉(zhuǎn)向盤扭矩的關(guān)系表示助力特性,仿真結(jié)果如圖 6 所示。可以看出助力特性曲線在不同速度下轉(zhuǎn)向盤轉(zhuǎn)矩與電機(jī)電流關(guān)系,在轉(zhuǎn)向盤轉(zhuǎn)矩在 1 Nm 及以下時(shí)助力電機(jī)沒有電流,隨著轉(zhuǎn)矩增大電流隨之平滑增大,沒有發(fā)生突變,當(dāng)轉(zhuǎn)矩大于 8 Nm 時(shí),電機(jī)電流飽和不再增大。

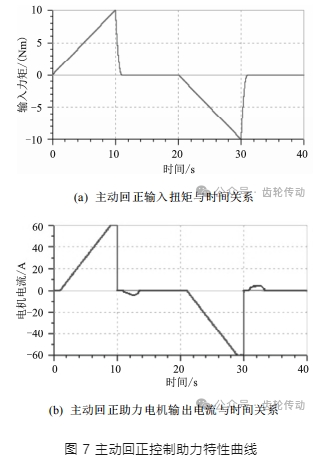
主動(dòng)回正控制
設(shè)定車速為 0 km/h,測(cè)試將轉(zhuǎn)向盤先向右轉(zhuǎn)動(dòng)90°待轉(zhuǎn)向盤回正后再向左轉(zhuǎn)動(dòng) 90°回正后的轉(zhuǎn)向盤轉(zhuǎn)矩和電機(jī)電流關(guān)系,圖 7 描述了助力電機(jī)主動(dòng)回正控制時(shí)助力特性曲線。對(duì)比圖 7(a)和圖 7(b)在前 10 s 電機(jī)處于常規(guī)助力控制,第 10 s 進(jìn)入主動(dòng)回正控制電機(jī)電流變?yōu)?0,由于轉(zhuǎn)向回正存在反向殘余角度,電機(jī)根據(jù)角度傳感器信號(hào)帶動(dòng)轉(zhuǎn)向盤回中,因而存在小數(shù)值的反相電流。
阻尼控制
當(dāng)快速轉(zhuǎn)動(dòng)轉(zhuǎn)向盤時(shí),轉(zhuǎn)向輸入扭矩很大和轉(zhuǎn)向瞬間角速度很大,助力電機(jī)輸出轉(zhuǎn)矩也比較大。為了因?yàn)閼T性作用造成的防止轉(zhuǎn)向盤過渡旋轉(zhuǎn),需要對(duì)電機(jī)進(jìn)行阻尼控制,改善車輛高速轉(zhuǎn)向的穩(wěn)定性,助力電機(jī)阻尼控制電機(jī)電流收斂情況如圖 8 所示。可以看出在 1 s 的時(shí)間內(nèi)迅速轉(zhuǎn)動(dòng)轉(zhuǎn)向盤并突然停止,電機(jī)電流相應(yīng)立即減小且產(chǎn)生反向電流促使轉(zhuǎn)向盤迅速停止,有效防止了轉(zhuǎn)向系統(tǒng)因慣性造成的超調(diào),保證了系統(tǒng)穩(wěn)定性。

摩擦和慣性補(bǔ)償后效果
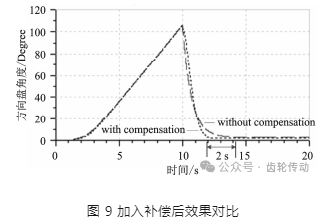
為了顯示控制策略中添加摩擦和慣性補(bǔ)償后對(duì)電機(jī)性能的提升效果,設(shè)置方向盤線型轉(zhuǎn)動(dòng),在 10 s 時(shí)轉(zhuǎn)動(dòng) 105°然后對(duì)比加入兩種補(bǔ)償后回正和未采用主動(dòng)回正控制的結(jié)果,如圖 9 所示。由圖 9 可以看到加入兩種補(bǔ)償后在第 12 s 時(shí)刻方向盤角度為零,而未添加補(bǔ)償時(shí)在第 14 s 時(shí)刻方向盤角度才為零,說明加入摩擦和慣性補(bǔ)償后電機(jī)在回正性能和響應(yīng)速度上均有一定改善,轉(zhuǎn)向時(shí)電機(jī)響應(yīng)速度更快,在回正時(shí)有 2 s 的提升效果且殘留角度更小。
4、結(jié)論
在總結(jié)目前電動(dòng)轉(zhuǎn)向助力系統(tǒng)系統(tǒng)仿真及控制策略研究基礎(chǔ)上,對(duì) P-EPS 展開研究工作,通過 AMESim 建立了 P-EPS 的半物理模型并對(duì)部分機(jī)械電子模型的正確性進(jìn)行了測(cè)試,針對(duì)所提出的三控制兩補(bǔ)償控制策略進(jìn)行仿真分析,測(cè)試結(jié)果表明所設(shè)計(jì)的控制策略達(dá)到了預(yù)期目標(biāo),表明了該仿真模型和控制策略的正確性和有效性,為臺(tái)架或?qū)嵻囋O(shè)計(jì)提供了參考依據(jù)。
參考文獻(xiàn)略.