近年來,慣性穩定平臺被廣泛應用于武器站、跟蹤雷達、望遠鏡等精密指向機構中。隨著機構的工作載荷越來越大,必須在穩定平臺中增加力矩放大裝置才能驅動負載進行高動態響應,傳統的方式是安裝減速器,但在武器站方位平臺中,受限于安裝空間較小,減速比大的減速器無法滿足體積要求,因此常采用行星減速器和齒輪齒圈兩級傳動的方式。采用齒輪齒圈的方式可以滿足載荷運動對驅動能力的要求,但同時會產生另一個問題:齒圈直徑較大,在制造過程中難以避免地存在加工誤差,導致齒輪齒圈的嚙合間隙在360°范圍內發生較大的變化。武器站通常需要在載體行進過程中對目標進行打擊,因此,需要隔離工作過程中路面擾動的影響,通常的指標是保證系統穩定精度在0.5mrad以上,所以齒輪齒圈之間的齒側間隙成為制約系統打擊精度的最重要因素之一。當驅動部件與負載失去直接接觸時,間隙出現在伺服系統中,導致負載的運動是“不可控” 的。因此,間隙非線性經常導致穩態誤差,甚至引起振蕩失穩,嚴重降低裝備的控制性能和穩定性。
國內外學者針對齒隙問題提出了多種解決方案,最典型且應用最廣泛的是以下三種方法:①增加支承結構消除間隙。這種消隙方式實現方便,但會增加機械部分的復雜性,并且支承結構的剛度通常較低,從而導致系統諧振頻率降低,限制了系統帶寬的提高。②采用控制方法對間隙進行補償。目前一般在閉環控制回路上設計補償控制器對齒隙非線性進行補償,間隙補償控制的優點是不需要增加額外的結構,節約成本,缺點是研究都以單電機驅動系統作為被控對象,可實現間隙的補償,但不能保證間隙的完全消除,在對精度要求非常高的場合往往無法滿足要求。③采用多電機驅動系統進行消隙。其中最典型的是雙電機精密傳動機構,對驅動從動軸的兩組電機施加大小相等、方向相反的偏置力矩,該方法在保證系統伺服精度的同時理論上可實現間隙的完全消除。因此,越來越多的研究者在高精度伺服裝置中采用雙電機精密傳動機構來消除間隙的影響。
在雙電機精密傳動機構中,為了真正實現間隙的完全消除,眾多學者對兩電機的偏置力矩施加方式開展了深入研究。應用最廣泛的偏置力矩施加方式主要有以下三種:定向偏置力矩、恒值偏置力矩和動態偏置力矩,其中定向偏置力矩和恒值偏置力矩兩種方式雖然簡單,工程上容易實現,但偏置力矩值的確定依賴于工程經驗。當系統處于穩定或靜止狀態時仍維持大的偏置力矩會造成較大的能量浪費,當載荷變化較大時,存在消隙不完全的風險。此外,未考慮電機在換向時從不接觸到接觸的狀態變化帶來的沖擊對控制精度和穩定性的影響,因此,目前相關研究逐漸轉向動態偏置力矩。
在動態偏置力矩的研究方面,孫龍飛等提出了一種基于電機電流的變偏置力矩消隙控制方法,消隙過程中所加載的偏置力矩直接根據負載電流而變化,進而實現變偏置力矩的消隙控制,但未從理論上給出系統間隙是否完全消除的依據。梁任等從控制器設計的角度出發,根據所需消隙力矩與負載力矩、運動速度和加速度之間的關系,設計了實時消隙力矩補償控制器來實現系統完全消隙,其不足是等效到負載端的力矩指令計算過于簡化,得到的力矩指令不夠準確。JIANG 等針對超重型立式銑床回轉工作臺,采用主從控制的方法消除了機床 C 軸齒輪間隙。薛漢杰提出基于速度偏差的力矩補償控制方法,兩電機的電流給定差值經控制器輸出作為附加的速度設定值,以相反符號分別反饋至主從電機的速度給定處,實現扭矩平衡分配,將消隙補償電壓設定值輸入至主從軸,與速度環給定值疊加后在輸出端形成定值偏置力矩,消除傳動間隙。以上兩 者均采用了主從控制,但主從控制存在一個電機速度滯后于另一個電機速度的問題。任海鵬等提出基于電流給定值的力矩補償控制方法,雙電機系統將位置偏差經位置控制器得到的電流給定值作為雙電機的力矩給定值,力矩補償環節是將電流給定與設定的力矩切換點比較后,決定電流環給定處疊加的偏置電流值,其缺點是實現起來較為復雜。
上述研究大都在工程層面對消隙方法進行了研究,但在理論上未給出合理的解釋,總結起來仍存在以下不足:①偏置力矩的施加依賴于工程經驗,而不是從理論上推導出完全消隙所需要的偏置力矩,即消隙方法不具有普適性;②消隙過程忽略了實際系統中兩路傳動鏈安裝間隙的不一致性。在系統啟動過程中,由于兩路傳動鏈間隙不一致,兩路行星減速器輸出端齒輪與大齒圈的接觸時間不一致,如果不采取控制措施,將導致消隙過程存在沖擊,嚴重時甚至引起系統失穩。本文提出了基于速度指令的動態偏置力矩和基于差速負反饋的交叉耦合同步控制相結合的復合消隙方法,在理論上推導系統間隙完全消除所需的偏置力矩,并有效地抑制消隙控制器因兩路傳動鏈間隙不同而引起的沖擊現象,提高系統的跟蹤精度和穩定裕度。
一、雙電機精密傳動機構動力學模型
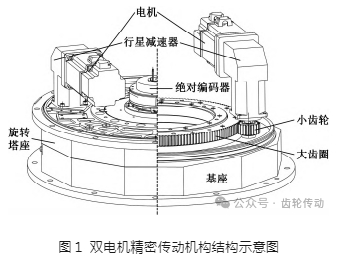
雙電機精密傳動機構通常由兩組具有相同標稱參數的永磁同步電機與行星減速器分別帶動具有相同模數與齒數的小齒輪,兩組小齒輪對稱分布于交叉滾子回轉支承(后文簡稱“大齒圈”)外圈兩側,大齒圈的外圈固定安裝在基座上,內圈與旋轉塔座固連。兩組小齒輪與大齒圈外圈齒輪嚙合后,在完成自轉的同時帶動裝有負載的旋轉塔座公轉,其傳動結構示意圖見圖 1。由于選用的行星減速器背隙小于3′,為了簡化分析,將第一級行星減速器傳動當作理想傳動環節,著重對第二級傳動鏈齒輪與大齒圈的傳動進行分析。
雙電機精密傳動機構動力學模型
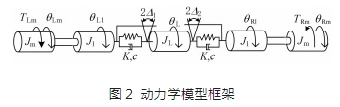
根據圖1所示的雙電機精密傳動機構結構,得到動力學模型框架(圖2),其中,Jm 為電機的轉動慣量,J1 為行星減速器的轉動慣量,JL 為旋轉塔座的轉動慣量;θLm 、θRm 分別為兩個電機的轉角;θL1、θR1分別為兩個行星減速器輸出端齒輪的轉角;θL 為旋轉塔座的轉角;Δ1、Δ2 分別為兩小齒輪與大齒圈的齒隙寬度;K、c 分別為小齒輪與大齒圈的嚙合剛度和嚙合阻尼。雙電機精密傳動機構中的兩路傳動鏈屬于并聯關系,因此,以其中一路傳動鏈為例進行分析。
首先,電機的電樞回路方程為
式中,U 為電機的電樞電壓;I為電機的電樞電流;L、R 分別為電機的電樞電感和電樞電阻;Ke 為電機的反電動勢系數。
電機驅動器為電流環模式,電流環的帶寬通常在1kHz以上,遠高于系統速度環響應帶寬,所以可將驅動器簡化為理想比例環節,即
式中,Kd 為驅動器放大系數。
永磁同步電機的電磁力矩與電樞電流成正比,因此有
式中,T 為電機的電磁力矩;KM 為電機的力矩系數。
對電機轉子進行受力分析,可得到電機端轉子的動力學方程:
式中,bm 為電機的等效黏滯阻尼系數;τ 為行星減速器輸出端齒輪的輸出力矩;i1 為行星減速器的減速比。
電機轉角與行星減速器輸出端齒輪轉角間的關系如下:
對小齒輪進行受力分析,可得
式中,τc 為齒輪與大齒圈之間的彈性力矩;b1 為行星減速器的黏滯阻尼系數。
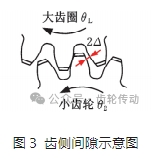
死區模型被廣泛應用于描述控制系統的齒隙非線性,設齒隙寬度為2Δ,如圖3所示,則行星減速器輸出端小齒輪與大齒圈外圈齒輪之間的間隙可以描述為
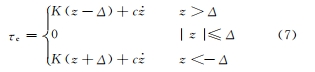
式中,z 為行星減速器輸出端齒輪與大齒圈的傳動誤差,z =θ1 -i2θL;i2 為小齒輪與大齒圈的齒數比。
根據旋轉塔座的受力情況,旋轉塔座的動力學方程為
其中,bL 為旋轉塔座的黏滯阻尼系數。聯立式(1)~ 式(8)可以得到包含行星減速器輸出端齒輪與大齒圈間隙的雙電機精密傳動機構動力學模型。
雙電機精密傳動機構動力學模型是進行系統參數分析的基礎,為消隙方法的提出提供理論依據。
機構動力學模型參數影響度分析
為了分析模型中的參數對系統特性的影響權重,對模型參數進行影響度分析,在 MATLAB/ Simulink中搭建1.1節建立的雙電機精密傳動機構動力學模型,利用靈敏度分析工具箱(sensitivi- tyanalyzer)進行模型參數的影響度分析。模型中的參數設置見表1,分析后獲得系統開環特性的影響度結果,如圖4所示。
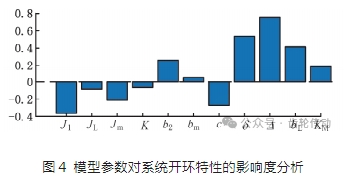
圖4中,δ 為兩路傳動鏈間隙的差值,其他參數如前文所述,變量值大于零說明參數與兩模型速度差值的最大值成正相關,反之則為負相關。從分析結果可以看出,系統模型中兩路傳動鏈間隙大小 Δ 和差值 δ 對系統開環特性的影響最大,而在實際系統中,這兩個參數受裝配因素的影響也最大,因此,對這兩個參數對系統特性的影響進行仿真分析。
為了抑制道路擾動對系統射擊精度的影響,系統處于穩定模式,因此系統的間隙是穩定精度的決定性因素。首先假設兩個小齒輪與大齒圈之間的間隙大小相同,分析間隙大小 Δ 對系統特性的影響;然后,當兩個小齒輪與大齒圈之間的間隙不同時,分析兩間隙之間差值δ 對系統特性的影響。
間隙大小 Δ 對系統特性的影響分析
由實際調試得知,系統的間隙在15′以內,因此假設間隙大小分別為0′、5′、10′、15′,并且兩路傳動鏈的間隙相同,觀察系統負載端速度在換向時的過渡情況,圖5所示為速度開環和速度全閉環時的仿真結果。

仿真結果表明,開環情況下,當系統不存在間隙時,負載端速度換向平滑,波動較小;當間隙增大時,速度在換向時的死區隨之增大,波動也變大;在速度全閉環后,速度經歷完死區后的振蕩幅值隨著間隙的增大而急劇增大,當間隙達到一定值時,甚至會引起系統的失穩。
間隙差值 δ 對系統特性的影響分析
假定軸1行星減速器輸出端齒輪與大齒圈之間的間隙為5′,而軸2的間隙在此基礎上分別加上0′、5′、10′、15′,圖6所示為開環和速度全閉環時的仿真結果。

仿真結果說明,負載端速度換向死區的大小只取決于兩路傳動鏈中較小的間隙值,與兩路間隙的差值無關。但隨著間隙差值的增大,會引起兩路小齒輪與大齒圈的接觸時間不一致,造成旋轉塔座在完成換向后的較長時間內仍存在較大的速度波動,前人提出的消隙方法未考慮該因素的影響,導致在偏置力矩的啟動階段存在沖擊現象。
結合圖5b和圖6b可知,當兩路傳動鏈的間隙大小和差值均較大時,在速度全閉環后,系統的伺服性能差,穩定性低,前人的研究只考慮如何消除間隙,卻忽略了兩路傳動鏈間隙的不一致性對系統特性的影響,造成系統跟蹤精度的提高很有限,伺服性能受到限制。
二、雙電機精密傳動機構復合消隙方法
為了實現雙電機精密傳動機構在保證完全消除間隙的同時抑制由兩路傳動鏈間隙不一致引起的系統沖擊現象,開展了復合消隙方法的研究。
復合消隙方法設計
圖7所示為雙電機精密傳動機構工作時,兩個行星減速器的輸出力矩τ1、τ2、驅動大齒圈的合成力矩Tout以及偏置力矩T0 之間的關系,Tcmd 為等效到負載端的力矩指令。
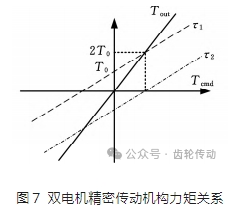
設負載端速度指令為 wcmd,根據雙電機精密傳動機構動力學模型,將速度指令等效為負載端的驅動力矩:
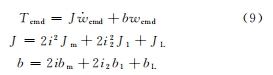
其中,J 為等效合成慣量,b 為等效合成阻尼系數。由圖7可知,要實現系統在運動全過程內的完全消隙,則無論速度指令 wcmd 多大,兩個行星減速器的輸出力矩方向必須保持不變且相反,如 τ1 >0,τ2 <0,因此可得兩齒輪之間的偏置力矩須滿足2T0 >|Tcmd|。負載端力矩指令的大小受到電機軸、小齒輪、大齒圈和負載的轉動慣量、阻尼,以及負載的運動速度和加速度等因素的影響:
方便起見,可以將式(10)轉化為
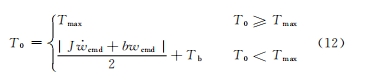
其中,Tb 為系統的靜摩擦力矩,保證系統在靜止或穩定狀態時依然可以克服靜摩擦,從而保證運動全過程內的完全消隙。
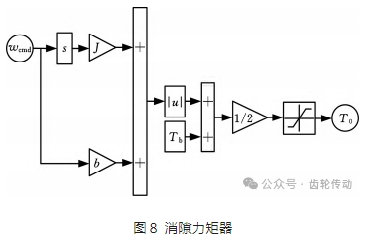
考慮到系統在運行過程中速度指令存在較大的變化,此時系統理論加速度過大,導致偏置力矩過大,易造成系統輪齒損壞,因此在偏置力矩的輸出端進行限幅,避免偏置力矩過大,保證系統安全運行,最終輸出力矩表達式為
根據式(12)搭建的消隙控制器如圖8所示。
在系統啟動過程中,由于兩路傳動鏈間隙不一致,故兩個小齒輪與大齒圈的接觸時間不一致,引起兩路電機的速度不同步。此外,系統中的電機、驅動器、行星減速器等由于制造和安裝誤差,同樣會引起系統兩電機的不同步,如果不采取控制措施,將導致消隙過程存在沖擊,嚴重時甚至引起系統失穩。
針對雙電機的同步問題,前人做了深入的研究,主要包括并聯同步控制、串聯同步控制和交叉耦合同步控制三種。其中并聯控制實現起來最為簡單,只需要給兩臺電機輸入相同的電壓指令,但這種方式的弊端是當系統中的某個電機受到干擾發生速度波動時,另一臺電機無法感知這種波動,從而導致兩電機出現速度差;串聯同步又稱為主從控制,即將一個電機的實際轉速作為另一個電機的指令,使從電機跟隨主電機的轉速,這種方式使從電機的轉速始終滯后于主電機轉速。在系統存在兩路傳動鏈間隙大小不一致時,以上兩種同步方式均無法解決啟動階段的沖擊問題。本文采用基于差速負反饋的交叉耦合控制方法,在間隙較小的傳動鏈發生接觸的瞬間,該路電機轉速發生變化,從而在該瞬間兩電機產生速度差,速度差信號在經過交叉耦合同步控制器后以相反的極性反饋回驅動器端,實現兩路電機速度保持同步,抑制間隙不一致引起的沖擊。
將基于速度指令的動態偏置力矩與基于差速負反饋的交叉耦合同步控制相結合,可以在保證間隙完全消除的同時,抑制兩路傳動鏈間隙不一致引起的沖擊現象。
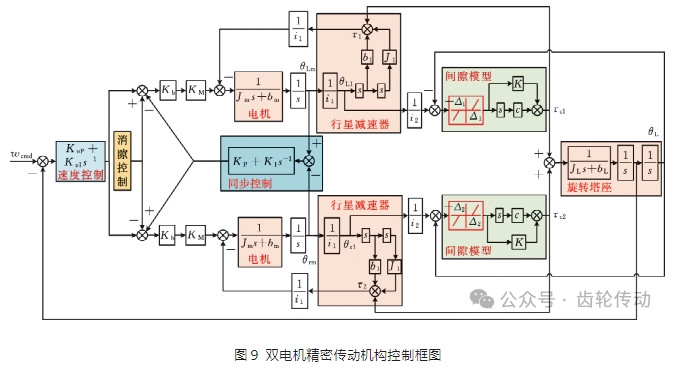
根據包含間隙的雙電機精密傳動機構動力學模型、消隙控制器和同步控制器,搭建了雙電機精密傳動機構控制框圖,如圖9所示。
復合消隙方法仿真分析
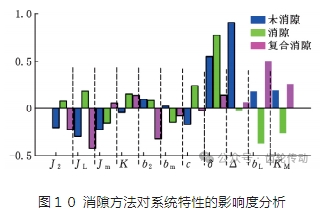
在雙電機精密傳動機構控制框圖的基礎上,利用靈敏度分析工具對系統速度全閉環后消隙方法的有效性進行分析,分析不同參數對系統跟蹤誤差的影響度,分析結果如圖 10 所示。可以看出,在未消隙時,系統跟蹤誤差受兩路傳動鏈間隙大小 Δ 和間隙差值 δ 兩個參數的影響最大,而在加入消隙控制器后(簡稱“消隙”,綠色),間隙大小 Δ 對系統的影響度明顯減小,而間隙差值 δ 成為 最大影響因素。在此基礎上,加入同步控制器(簡稱“復合消隙”,粉色),間隙大小 Δ 和間隙差值 δ 對系統跟蹤誤差的影響均明顯減小,證明了復合消隙方法的有效性。
在前期的實際測試中發現,兩路傳動鏈的間隙分別約為15′和10′,因此,將兩路傳動鏈的間隙值分別設置為15′和10′,仿真分析消隙方法對系統時域響應的影響。由于系統在開環情況下并無消隙需求且本文提出的消隙控制器是基于速度指令設計的,故仿真和實驗均只分析速度閉環時的消隙效果,圖11所示為在速度閉環時不同消隙情況下的負載端速度。
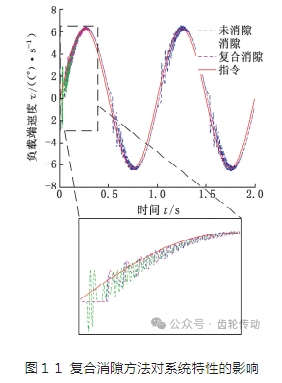
圖11中,藍虛線為未采取消隙措施時的控制效果,綠虛線為加了消隙控制器但未加同步控制器時的控制控制效果,粉虛線為加入本文提出的復合消隙方法時的控制效果。從綠虛線可以看出,加入消隙控制器后,負載端速度除了在啟動階段存在一定的沖擊外,其他時間段的跟蹤誤差明顯減小,在此基礎上加入同步控制器后,在保證了跟蹤精度的同時,消除了啟動階段系統的沖擊現象,提高了系統的穩定裕度。
三、實驗驗證
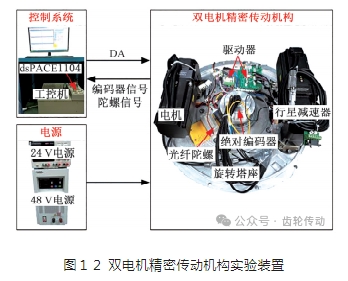
為了驗證復合消隙方法的有效性,搭建雙電機精密傳動機構實驗測試裝置,利用dSPACE 半實物仿真平臺開展性能驗證實驗。
實驗裝置
搭建了圖12所示的雙電機精密傳動機構實驗裝置,主要由 2 個永磁同步電機 (型號:SPALY80)、2 個電機驅動器(型號:Elmo,P/N:SOL-WHI20/100PYE)、2個 L 形行星減速器(型號:FABR060-25-S2-P1)、武器站方位平臺、絕對式編碼器(型號:CAPRO-B112050)、光纖陀螺(型號:FOG-118)、24V 電源、48V 電源、dSPACE1104 和工控機組成。
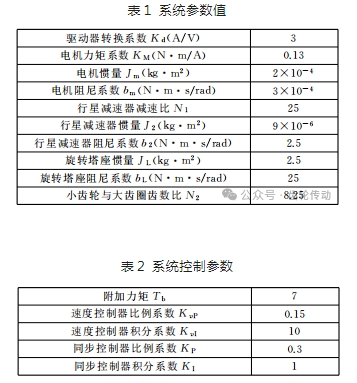
通過查閱實驗設備的具體型號和關鍵參數以及前期的測試結果,整理得到表1所示的系統參數值。表2所示的系統控制參數通過測試獲得。
利用搭建的雙電機精密傳動機構實驗裝置進行了消隙方法驗證實驗。為了充分驗證復合消隙方法的有效性,令系統處于速度全閉環狀態,當系統分別為不消隙、消隙和復合消隙時,對比不同速度指令信號下的控制效果,激勵信號分為以下6 種:(a)πsin πt,(b)πsin 2πt,(c)2πsin πt,(d)2πsin 2πt,(e)(2πt)2,(f)2(πt)2。
實驗結果分析
本文設計的消隙控制器中,兩電機的偏置力矩大小只與速度參考指令相關,不失一般性,以速度指令2πsin 2πt為例,根據圖8所示搭建的消隙控制模塊,得到的偏置力矩信號如圖13所示。可以看出,偏置力矩的變化范圍在3.5~14N·m 之間,由于消隙控制器輸出的偏置力矩以相反的方向施加于速度控制器輸出端(圖8),故兩個小齒輪的偏置力矩始終保持方向不變且相反。
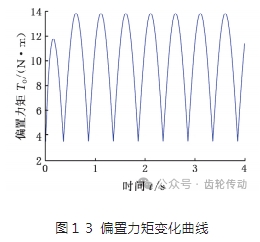
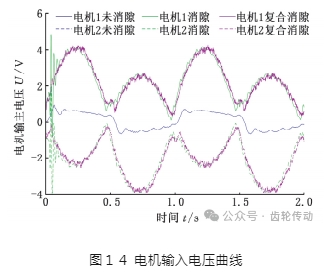
圖14所示為兩個電機的實際輸入電壓信號曲線,未消隙時,電機電壓在-1~1V 之間變化,電機的出力方向發生變化,因此,系統將受到間隙的影響。本文提出的消隙控制器則保證了一個電 機電壓恒為正,另一個電機電壓恒為負,說明兩個電機的出力方向始終保持不變且相反,并且電機出力可以克服系統靜摩擦,保證兩個小齒輪與大齒圈保持接觸,驗證了本文提出的消隙控制器可實現間隙的完全消除。
系統在不同幅值不同頻率以及不同類型激勵信號下的消隙方法對比結果如圖15所示。可以看出,當未采取任何消隙策略時,系統在全過程均存在大的速度波動;加入消隙控制器后,除了在啟動階段存在一定的沖擊之外,其他時間段的速度波動得到明顯減小;而采取復合消隙方法后,系統在全過程的速度波動均明顯減小,并且啟動階段的沖擊現象也得到了有效的抑制,證明了復合消隙方法的優越性。
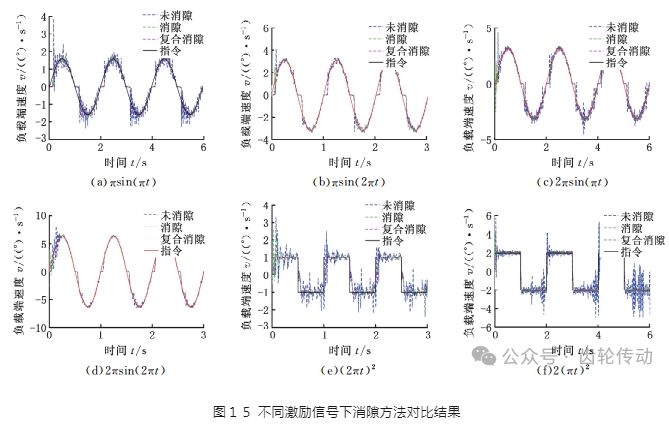
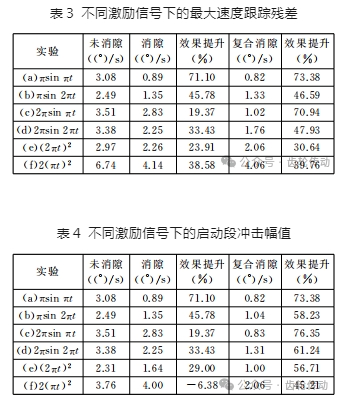
為了對消隙策略進行量化的評價,將圖15中不同激勵信號下曲線的最大速度跟蹤殘差和啟動階段的沖擊幅值匯總到表3和表4中。對比表3 和表4可知,本文提出的復合消隙方法在大幅度減小速度波動的同時能有效抑制消隙控制器帶來的啟動段的沖擊幅值,驗證了復合消隙方法的有效性。
四、結語
實驗結果表明,采用復合消隙方法后,兩個電機的出力方向始終保持不變且方向相反,偏置力矩最小值仍可以克服系統靜摩擦,達到了完全消除間隙的目的;在不同的激勵信號下,采取復合消隙方法時,系統速度跟蹤殘差的抑制效果最大可達73.38%,而啟動階段的沖擊幅值衰減效果最大可達76.35%,驗證了復合消隙方法的優越性。研究成果為雙電機精密傳動機構的高精度高動態控 制方法研究和實際工程應用提供了理論基礎與技術支撐。
參考文獻略.