新能源電動汽車是汽車產業轉型升級發展的重要方向,據專家預測未來新能源汽車保有量還會持續快速增長。傳統汽車采用多個擋位的齒輪組進行動力傳遞,而新能源汽車相對于傳統汽車而言,電機會產生更高的轉速以及更大的扭矩,所以僅需要2~3個傳動比就可以實現加速,這就要求新能源電動汽車減速器具有更高的適應性。在新能源電動汽車減速器中,所有齒輪均參與全工況工作,且轉速較高,這對齒輪的參數設計提出了更高的要求。
新能源電動汽車工作時,其噪聲主要來自于電機和電動汽車減速器的振動噪聲,而驅動電機的噪聲遠遠小于減速器的噪聲。減速器噪聲產生的主要原因是齒輪的制造誤差、加工誤差、傳動系統受載不均等,導致在任意時刻從動齒輪轉角超前或滯后于理論轉角,從而產生傳動誤差。齒輪的周期嚙合形成了周期性的波動,這種波動與傳動系統的某一固有頻率相接近時系統就會產生共振和噪聲。因此,對新能源電驅動汽車減速器高速齒輪進行合理的微觀修形可以改善齒面的載荷分布,降低傳動誤差,提高齒輪的性能并達到降振降噪的目的。
齒輪系統傳動性能的評價指標包括傳動誤差波動量和接觸應力。齒輪在運轉過程中的噪聲與振動、嚙合剛度有直接關系。為了減少振動噪聲,在不改變齒輪基本參數的前提下,可以通過微觀修形改善齒輪的傳動誤差和接觸應力來提高其傳動性能。
一、齒輪修形
電動汽車減速器傳動系統受載之后,軸、軸承、箱體等零部件都會發生變形,使齒輪副產生錯位,導致齒輪壽命降低。通過對齒輪微觀修形,降低錯位量的影響,從而使得其接觸應力、彎曲應力、傳動誤差降低到可以接受的范圍之內,最終提高齒輪性能,達到減振降噪的目的。
齒輪微觀修形包括齒廓修形、齒向修形兩種修形形式。齒廓修形是在齒廓方向上的線性修形,對于漸開線齒輪主要是沿著漸開線方向進行修形,又分為齒頂修緣和齒根修緣。采用齒廓修形可以減小齒輪嚙入、嚙出沖擊,增加傳動平穩性,降低振動和噪聲。齒向修形是指沿著齒向方向在兩端去除材料,中間保持不變,形成鼓的形狀。采用齒向修形主要是避免棱邊接觸,減小邊緣應力,改善齒面接觸情況,增加傳動穩平性,降低振動和噪聲。齒向修形又分為齒向斜度和齒端修薄。齒向斜度是沿著齒向方向去除材料,使得實際齒面與標準齒面在齒向上形成一定的斜度,目的是改善齒輪沿齒寬方向上的偏載,使載荷分布更加均勻,增加傳動平穩性,降低振動和噪聲。齒端修薄是沿著齒向兩端小段范圍內將齒厚向齒寬方向逐漸削薄, 目的是減小齒端應力沖擊,使齒輪嚙入、嚙出更加平順,進而提高齒輪強度,降低振動和噪聲。
二、新能源電動汽車減速器仿真模型
某電動汽車減速器額定功率為365kW,額定轉速為434r/min,額定扭矩為841.5N·m。對高速運行工況下齒輪嚙合錯位量引起的傳動誤差、沿齒寬方向的單位長度載荷、齒輪嚙合面接觸斑點動態參數變化進行仿真分析,將結果作為電驅動汽車減速器牽引齒輪修形方案設計的理論依據。
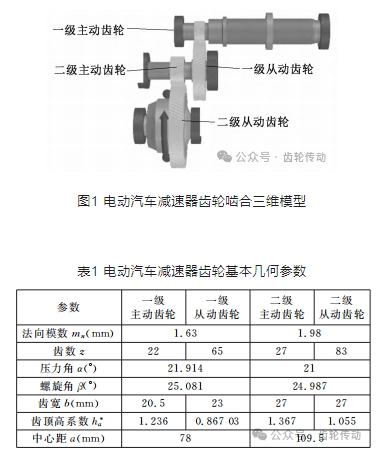
新能源電動汽車減速器包括兩級齒輪傳動,通過兩級減速實現增大扭矩的目的。利用 Romax軟件建立的電動汽車減速器齒輪嚙合三維模型如圖1所示。將低級齒輪副 (一級齒輪副)作為研究主體,采用 Romax 提供的遺傳算法和全因子法對低級齒輪副進行精確修形。所選齒輪材料為合金鋼,表面采用滲碳淬火,齒面硬度為 HRC58~ HRC64,齒輪精度為 7 級,材料泊松比為0.3。電驅動汽車減速器齒輪基本幾何參數如表1所示。
三、齒輪修形前仿真分析
對齒輪副進行仿真分析,得到的一級主動齒輪沿齒寬方向的單位長度載荷分布如圖2所示,一級齒輪副傳動誤差如圖3所示。
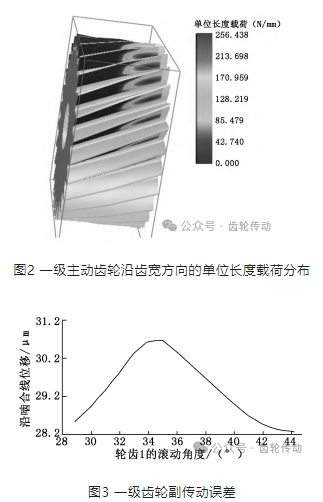
從圖2可以清晰地看出:一級齒輪副嚙合時,主動齒輪承受的最大單位長度載荷(256.438N/mm)及齒輪嚙合面接觸斑的分布情況,沿著齒寬方向存在較嚴重的偏載。
從圖 3 中可以看到:齒輪嚙合線的最大位移為 30.7 μm,最小位移是 28.26μm,所以傳動誤差是 2 .44μm。傳動誤差值較高,齒輪在嚙合過程有沖擊,此時可以認為減速器整體傳動性能不佳。
為了使相互嚙合的輪齒接觸情況變好,載荷沿齒寬方向分布均勻,減少輪齒的偏載現象,接觸點應盡可能控制在齒長中部,最大限度地降低單位齒長的載荷以及邊緣應力,提高齒輪壽命和耐久性,因此需要對一級齒輪副主動齒輪進行齒廓修形和齒向修形。
四、一級齒輪副主動齒輪修形
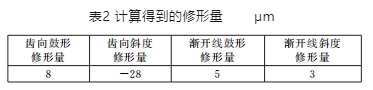
根據 Romax第二代遺傳算法,對一級齒輪副的齒廓方向和齒向方向計算修形量,優化目標設定為傳動誤差為0,峰值載荷最小。經過計算得到的修形量如表2所示。
五、齒輪修形后仿真分析
根據計算得到的修形量對主動齒輪進行參數設置, 經過分析得到的一級主動齒輪沿齒寬方向的單位長度載荷分布與一級齒輪副傳動誤差,分別如圖4、圖5所示。
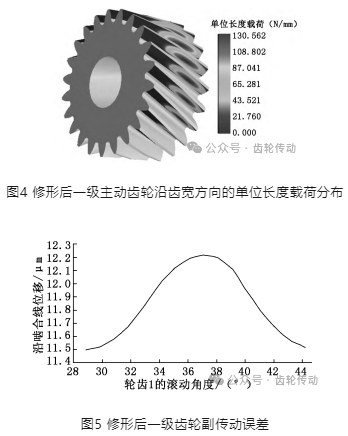
從圖4可以看到:一級主動齒輪微觀修形后,沿齒寬方向的最大單位長度載荷為130.562N/mm,比修形前降低了125.876N/mm,接觸斑也趨于中間,應力偏載有較大改善。從圖5可以看到:齒輪的嚙合線最大位移為12.21μm,最小位移為11.5μm,傳動誤差為0.71μm,比修形前降低了1.73μm,滿足設計要求。
六、結論
某電動汽車減速器的電機向一級齒輪副主動齒輪傳遞動力時,電機帶動輸入小齒輪高速運轉,一級齒輪副主動齒輪沿齒寬方向單位長度載荷較大,而且易發生偏載,傳動誤差較大。通過對齒輪微觀幾何修形,一級主動齒輪單位長度載荷分布和一級齒輪副傳動誤差有了明顯改善,安全系數也有了較大的提高。
參考文獻略.