大型礦用自卸車作為一種開發(fā)大型礦場的高效率運輸車輛,其在大型礦場的作用一直很重要,已經(jīng)成為大型露天礦場的生力軍,其輪邊減速器采用的是電驅(qū)動方式, 與傳統(tǒng)的機械傳動相比較電驅(qū)動方式具有優(yōu)勢,優(yōu)勢主要有占用空間小、易于控制、制動性能好、效率高。由于礦車的載重大并且礦場路況復(fù)雜環(huán)境差,使得減速器長時間處于高脈動載荷、高溫的環(huán)境中,是大型礦用車易損傷的主要部件,且維護(hù)難度大,成本高,影響車輛的整體運行穩(wěn)定性。因此,對輪邊減速器的設(shè)計質(zhì)量和性能提出了嚴(yán)格的要求,必須合理設(shè)計齒輪傳動系統(tǒng)的整體結(jié)構(gòu)形式,保證支撐零件具有足夠的強度和剛度,選擇合適的軸承及潤滑系統(tǒng),并且要考慮由于箱體、輪齒、傳動軸、軸承等的彈性變形以及安裝過程等導(dǎo)致的齒輪嚙合錯位,影響齒輪的接觸強度和彎曲強度,提高輪邊減速器的整體使用壽命。
RomaxDesigner軟件可以對齒輪箱、軸、齒輪、軸承等進(jìn)行建模、仿真和優(yōu)化設(shè)計等,所以在汽車、航空航天、工程機械等領(lǐng)域有著很大的應(yīng)用。本文以大型礦用電動輪輪邊減速器齒輪參數(shù)優(yōu)化為目標(biāo),應(yīng)用 RomaxDesigner 軟件建立系統(tǒng)模型,在各個工況下,綜合考慮系統(tǒng)內(nèi)各彈性零件的變形對齒輪嚙合的影響,對齒輪的齒向和齒廓進(jìn)行修形,得到想要的齒輪修形數(shù)據(jù),提高齒輪的接觸、彎曲安全系數(shù)。
在齒輪修形方面,張俊等將斜齒行星系作為研究對象,擬合出綜合修形的響應(yīng)面函數(shù),通過計算得到輪系的最佳修形參數(shù),從結(jié)果來看,顯著改善了修形后的齒面受載荷情況;Tang等采用 RomaxDesigner軟件建立了汽車多級齒輪傳動系統(tǒng)的模型,提出了齒廓修形和螺旋線修形相結(jié)合的綜合修形方式,結(jié)果顯示,齒輪傳動誤差值降低了54%,偏載情況得到了一定程度的改善;田德等將風(fēng)電增速箱作為研究對象,采用 RomaxDesigner軟件中的遺傳算法對齒輪進(jìn)行綜合修形,把仿真和經(jīng)驗計算結(jié)果進(jìn)行對比分析,結(jié)果顯示,在穩(wěn)定性和可靠性方面,高速齒輪修形后都得到了很大的改善。
一、輪邊減速器的建模與加載
154t電動輪自卸車輪邊減速器齒輪系結(jié)構(gòu)示意圖如圖1所示。
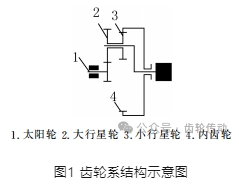
應(yīng)用 RomaxDesigner軟件進(jìn)行建模,分別建立齒輪組、軸的幾何模型,齒輪選用的材料是 20Cr2Ni4A 合金鋼,20Cr2Ni4A 合金鋼的材料參數(shù)分別是彈性模量 207GPa、泊松比0.29、密度7.85t/m3,輪邊減速器的基本參數(shù)見表1。
根據(jù)各個齒輪在箱體中的位置對軸在箱體的空間坐標(biāo)進(jìn)行定義,然后將齒輪依據(jù)設(shè)計安裝在軸上,根據(jù)受力情況在 RomaxDesigner軟件軸承數(shù)據(jù)庫中選用適當(dāng)?shù)妮S承,如果軸承數(shù)據(jù)庫中沒有合適的軸承還可以輸入軸承參數(shù)自定義軸承。
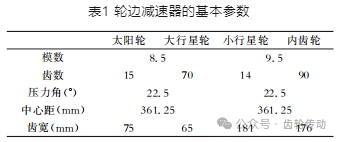
在太陽輪軸上設(shè)置一個輸入功率載荷,在內(nèi)齒輪上設(shè)置一個輸出功率載荷,根據(jù)表1建立輪邊減速器虛擬樣機模型,如圖2所示。
減速器的加載
在輪邊減速器虛擬樣機仿真運行前首先要對樣機各項參數(shù)進(jìn)行設(shè)置,包括樣機工作溫度、使用系數(shù)、潤滑油的選擇、精度等級、動載荷系數(shù)、齒向載荷分布系數(shù)、節(jié)點區(qū)域系數(shù)、安全系數(shù)等,然后進(jìn)行工況設(shè)置,本文的輪邊減速器虛擬樣機的工況為運行功率為 600kw、 轉(zhuǎn)速為1011rpm。
二、齒輪修形
美國學(xué)者 Walker以減少齒輪傳動誤差為目的,提出了齒輪修形的設(shè)想,并通過對直齒輪齒面進(jìn)行微觀修形, 減少了傳動誤差, 從而有效改善了輪齒之間的沖擊現(xiàn)象。各個國家的齒輪修形標(biāo)準(zhǔn)都不相同,對于齒輪修形所需要的參數(shù),最初國內(nèi)外企業(yè)主要是依據(jù)實驗與經(jīng)驗來確定的。而通過國內(nèi)外高校對齒輪修形的研究,已經(jīng)逐漸形成了一些修形理論。齒輪修形可以分成齒廓修形和齒向修形。
齒廓修形
齒廓修形又稱為齒高修形,是指通過對齒輪齒廓進(jìn)行細(xì)微的修整,能夠降低齒輪在嚙合過程中的嚙入與嚙出過程中產(chǎn)生沖擊的方法。
齒輪單雙齒嚙合過程中輪齒的載荷分布會出現(xiàn)顯著的突變,同時輪齒的彈性變形也會相應(yīng)地發(fā)生變化,因此實際的漸開線齒輪會有嚙合干涉。所以需要對齒輪齒廓采取細(xì)微修整,使它偏離理論齒廓。齒廓修形主要由修緣、修根和挖根組成。
齒廓修形量受輪齒受載時發(fā)生的彈性變形和加工中產(chǎn)生的基節(jié)偏差影響,本文齒廓修形量計算選用的公式:
Δ=δ+Δfb (1)
式中,Δ是齒廓修形量;δ是輪齒受載發(fā)生的彈性變形;Δfb 是齒輪加工中的基節(jié)誤差。
彈性變形δ的計算公式:
式中,KA 為使用系數(shù);Ft 為切向力,N;b 為齒寬, mm;α為端面壓力角,(°);cr 為嚙合剛度,GPa;Kmp 為分支系數(shù)。
齒向修形
齒高修形是指在齒寬方向上對齒面進(jìn)行修形,從而改善齒面上應(yīng)力集中問題的一種方法。為了減少齒輪的應(yīng)力集中問題,就需要對齒輪進(jìn)行齒向修形,齒輪的齒向修形包含了齒端修薄、鼓形修形、齒向斜度修形三種修形方法,由于是重載礦用車所以采用三者結(jié)合的修形方法。
其修形齒端修薄量Δs為
式中,Fβ5為5級精度齒輪的齒向公差,um;齒端修薄可采用拋物線修形方式,文獻(xiàn)推薦的修形長度bc 取 0.1b,
鼓形修形量Ca 為:

式中,fg 為由精度決定的齒向誤差 (um);A 為常數(shù),A 的取值與齒輪精度相關(guān)。
齒向斜度修形量Cc 為:

式中,Ft 為切向力,N;Fβy為嚙合斜度,um;Fβx 為歪斜度在嚙合初始值處的值,um。
三、樣機的仿真與優(yōu)化
修形前的仿真
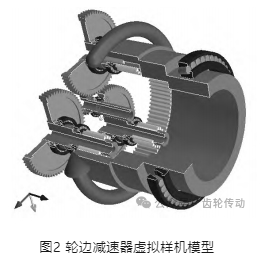
在等效載荷作用下,對樣機進(jìn)行模擬得出齒面載荷分布情況,如圖3所示。
內(nèi)齒輪與小行星的傳動誤差變化如圖4所示。
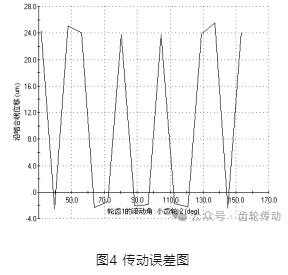
從齒面載荷分布情況看修形前小行星輪與內(nèi)齒輪之間存在明顯的偏載現(xiàn)象,齒輪的一端基本沒有承受載荷, 而另一端承受的載荷非常大。導(dǎo)致齒輪一端出現(xiàn)膠合等失效形式,影響輪邊減速器的工作性能。從圖4中能夠得出,修形前的齒輪副傳動誤差較大,會產(chǎn)生嚴(yán)重的嚙合沖擊。所以必須對小行星輪與內(nèi)齒輪進(jìn)行齒輪修形,考慮到 修形成本和難度故只對小行星輪進(jìn)行修形,不對內(nèi)齒輪修形。
齒輪的修形與仿真
此輪邊減速器是行星輪減速器設(shè)計的齒輪為直齒輪, 使用系數(shù) KA 取 1.25;齒寬b=176;齒輪綜合嚙合剛度 Cr=20.13GPa;端面壓力角α=22.5°;加工基節(jié)誤差為 18um;將數(shù)據(jù)代入式(4)計算然后取整得鼓形修形量Ca= 28um;由式(3)得齒端修薄量 Δs=22~42um;由式(1)得齒廓修形量 Δ=68.64um,由式 (5) 得齒向斜度修形量Cc=270.01um,取 Cc=270um。將上述參數(shù)通過 Romax Designer仿真,對結(jié)果分析后再對參數(shù)進(jìn)行微調(diào)得到最佳的效果。經(jīng)過微調(diào)后的參數(shù)分別為Ca=35um;Δs= 37.44um;Δ=58.50um;Cc=264um,此時齒面載荷分布情況,傳動誤差變化如圖5、圖6所示。
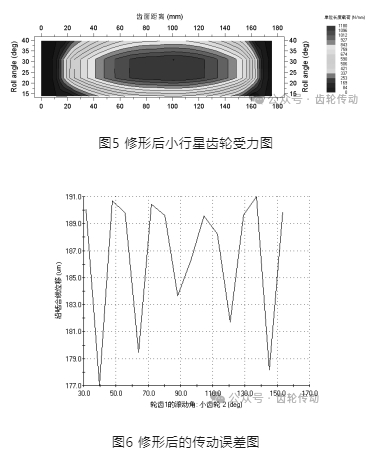
優(yōu)化后齒輪齒面上的單位長度載荷比修形前降低了50%以上,明顯改善了齒輪偏載現(xiàn)象,降低齒面的單位長度載荷和齒輪偏載有利于提高齒輪的壽命,增加了齒輪承載能力,能夠得出修形后的傳遞誤差有顯著地降低,傳動誤差由27.67um 下降到修形后的13.97um,下降幅度超過50%,修形后還存在傳動誤差的波動,但齒輪的傳動誤差波動的范圍大大的降低了,表明修形后齒輪的動態(tài)性能得到了比較大的改良。
四、總結(jié)
(1)本文基于齒輪齒廓修形與齒向修形的基本原理, 以大功率、低速重載的齒輪為研究對象,提出了齒輪的修形應(yīng)選擇齒端修薄、鼓形修形、齒向斜度修形三者相結(jié)合的修形方法,然后運用 RomaxDesigner軟件對優(yōu)化后的模型進(jìn)行仿真分析,分析的結(jié)果表明此修形方法增大了輪齒實際接觸嚙合線的長度,對齒面的嚙合情況有較大的改善。
(2)在等效載荷工況下,使用 RomaxDesigner軟件對154t大型礦車電動輪輪邊減速器的齒輪副進(jìn)行仿真分析,確定了齒輪的修形參數(shù)。并且對齒輪進(jìn)行修形,使該輪邊減速器中的齒輪在嚙合過程中的偏載和沖擊等問題得到了有效的解決。
參考文獻(xiàn)略.