行星齒輪變速箱具有傳動比大、承載能力強等優點,在現代工業中得到廣泛應用。它們一般在重載和惡劣的工作環境下工作,其關鍵部件包括太陽齒輪、行星齒輪及齒圈等,都會出現嚴重的點蝕和疲勞裂紋。
近年來,許多研究者對行星齒輪變速箱的故障診斷做出了大量貢獻。其中,一批學者通過動力學建模與分析研究出齒輪故障、制造誤差和負載對齒輪箱振動響應的影響。Lei等提出了統計指標為常數情況下的行星齒輪箱狀態監測方法。Bartel- mus等提出了非平穩運行狀態下的行星齒輪箱狀態監測。Feng等總結出行星齒輪箱振動信號的特征頻譜。然而,行星齒輪變速箱一般用于類似風力發電機組這類運行狀態不穩定的情況,此類情況下,行星齒輪箱振動信號特征為非平穩特征。在非平穩條件下提取行星齒輪變速箱的時變故障信息較為困難。時頻分析方法因為能有效地揭示時變特征,而常被用于提取非平穩信號的故障信息。時頻分析提供了一種可用并且強大的方法用于提取包含重要物理參數的非穩態信號的瞬時頻率特征。關于瞬時頻率估計的方法,已經有了大量的研究,其中基于時頻分布的瞬時頻率估計方法在處理嚴重噪聲信號方面具有出色的特性和穩定性,因此近幾年獲得了大量的關注。
為了對瞬時頻率的特征做精確的估計,能否獲得高的時頻分辨率被認為是衡量時域分析方法的關鍵。有3種傳統的時頻分析方法,即短時傅里葉變換、連續小波變換和魏格納分布。短時傅里葉變換和連續小波變換應用于線性時頻分析領域,這兩種方法通過內積來處理信號,并且可以定位時間和頻率。然而,根據海森伯格不確定原理,這兩種方法都不能同時獲得任意高的時頻分辨率。因此可以認為,這些方法在保持良好時間分辨率時僅能保證較低的頻率分辨率,反之亦然。筆者提出的基于快速路徑優化的自適應短時傅里葉變換(adaptiveshort timefouriertransform,簡稱 ASTFT)方法,希望通過快速路徑優化方法獲得瞬時頻率變化規律來改變時窗長度,從而獲得更恰當的時頻分辨率。在此基礎上,再次通過使用快速路徑優化方法來提高瞬時頻率估計的準確性。
一、基本原理
ASTFT方法:傳統短時傅里葉變換的時頻窗時寬是固定不變的,但大多數工程信號的瞬時頻率變化規律并不恒定,使用時窗固定的短時傅里葉變換處理此類信號效果必然不好。
自適應短時傅里葉變換的時窗長度隨瞬時頻率的斜率(即瞬時頻率的一階導數)變化而改變,在瞬時頻率較大時使用短時窗的時頻核函數,以取得較高的時間分辨率;在瞬時頻率的斜率較小時使用長時窗的視頻核函數,以取得較高的頻率分辨率。
對于一個純頻率調制信號,例如:s(t)=eif(t) ,Co- hen給出的最優時窗長度和瞬時頻率斜率的關系如下
其中:f′(t)為瞬時頻率的一階導數。
當對信號s(t)采用變窗高斯核函數的短時傅里葉表達式時,時窗長度 Tt 和時變的標準差σ(t)之間的關系為
結合式(1)和式(2)可以推出
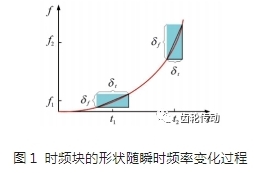
因此,當時頻核函數的標準差參數σ(t)按照式(3)取值時,變窗高斯核函數的短時傅里葉變換將會得到最優分辨率。舉例說明時頻分辨率與瞬時頻率變化關系如圖1所示。圖1中:紅線為頻率隨時間變化的時頻脊線;橫坐標為時間t;縱坐標為頻率 f;圖中矩形為時頻塊。從圖中可以看出時頻塊的形狀隨瞬時頻率斜率變化過程,當瞬時頻率的斜率變大時,時頻塊的高度δf 變大,寬度δt 變小,時間分辨率變高而頻率分辨率變低。
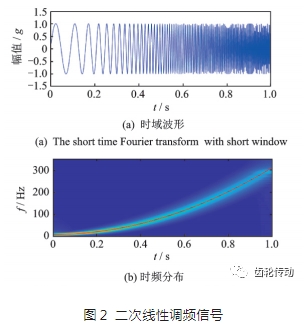
基于快速路徑優化的脊線提取: 參考文獻給出了脊線的定義。如 圖 2 所示,使用短時傅里葉變換分析了一個二次線性調頻信號,左側為信號時域波形,右側為信號時頻分布圖,圖中紅色部分是時頻矩陣的極大值序列,其包含了大部分的振動能量,通常被認為是時頻分布的脊線。信號由式(4)掃頻得到
其中:瞬時頻率為f(t)=10+300t2。
文獻中給出了一些脊線提取的方法,然而大多數方法無法準確恢復能和信號真實瞬時頻率相匹配的脊線。例如,基于瞬時頻率估計的多項式線性調頻小波變換方法在處理嚴重噪聲信號時效果并不好。最明顯的原因是它只考慮時頻分布中每一離散點的最大幅值。所以,筆者采用了一種包含快速路徑優化(afastpathoptimization,簡稱 FPO)的瞬時頻率提取方案。該脊線提取方案的具體步驟與原理如下:
1)使用時頻變換方法計算信號的時頻分布矩陣,得到每一時刻的幅值極大值 En(t),及其對應的頻率 Pn(t)
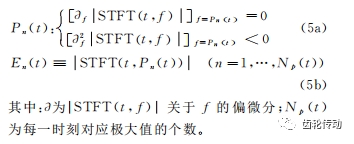
2)通過使用Pn(t)的相鄰節點 Pn(t)+Δf 和 Pn(t)-Δf 的二次插值對Pn(t)進行修正。優化方案如下
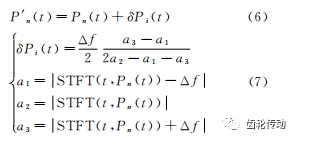
其中:Δf 為時頻矩陣的頻率分辨率;Pn由式(5)計算得出。
3)通過對相鄰時刻極大值點對應頻率的差值進行懲罰,構造極大值點Pn(tm)的權重函數
其中:w 為保證Pn(tm)與 Pk(tm-1)之間連續性的懲罰因子
其中:fs 為采樣頻率;σ為高斯窗函數的參數。
因此,使用式(8)的權重函數構造路徑優化函數如下
4)通過對上述構造的路徑優化函數進行求解,得出t1~tm 時刻的最優組合{P(t1),P(t2),…, P(tM )},即為所提脊線。
相對于一些瞬時頻率估計方法,此方案有3個優點:①使用二次插值定位幅值極大值的頻率更加的精確;②用來提取脊線的路徑優化函數不僅考慮到脊線當前點的幅值大小,還考慮到脊線的連續性;③快速路徑優化的脊線提取方法可以有效地避開隨機噪點對所提脊線的干擾。
基于快速路徑優化脊線的 ASTFT:自適應短時傅里葉變換能夠根據瞬時頻率的斜率自動調整時窗寬度,從而在瞬時頻率斜率小的時 候保證較高的的頻率分辨率,在瞬時頻率斜率大的時候保證較高的時間分辨率。然而,在對原始信號做 ASTFT 之前,要先進行瞬時頻率估計,以瞬時頻率的斜率作為變化時窗的參考。本研究提出了使用時頻分布的脊線來計算瞬時頻率斜率,以此計算自適應短時傅里葉變換時所使用的變化時窗。其具體實現步驟為:
1)對原始信號進行短時傅里葉變換得到初步的時頻分布S(t,f);
2)對S(t,f)進行基于快速路徑優化的脊線提取得到f(t);
3)確定自適應短時傅里葉變換的標準差參數![]()
4)以σ(t)為標準差參數對s(t)進行自適應短時傅里葉變換得到 ASTFT(t,f)。
二、仿真信號分析
仿真信號構造:為驗證所提方法在時頻分析方面的有效性,構造仿真信號s(t)如下
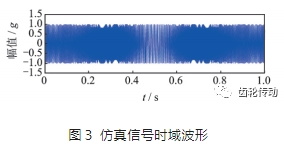
對信號進行時頻分析前加入信噪比為 -1dB 的高斯白噪聲。采樣頻率為2048Hz,時域波形如圖3所示,其理論瞬時頻率f(t)如下
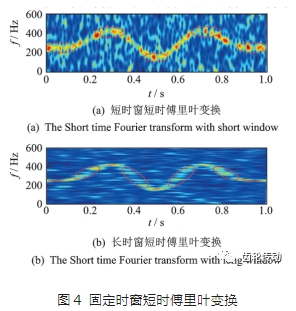
仿真信號分析:通過對s(t)做固定時間窗的短時傅里葉變換,可以看出,在瞬時頻率斜率較大的時候(圖4(a)中紅圈部分),長時窗的短時傅里葉變換(高斯窗函數的標準差參數σ取0.004,σ越小時窗長度越長)效果較差,能量較分散;在瞬時頻率斜率較小的時候(圖4(b)中紅圈部分),短時窗的短時傅里葉變換(高斯窗函數的標準差參數σ取0.04,σ越大時窗長 度越短)效果較差,能量不夠集中。
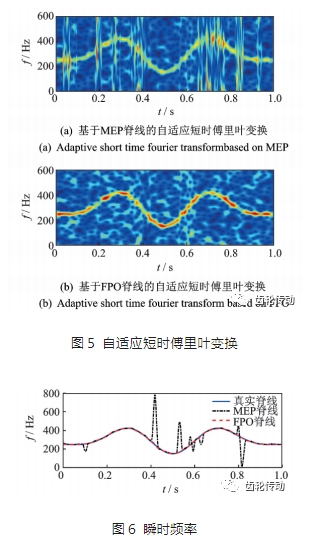
同時對s(t)做自適應短時傅里葉變換(高斯窗函數的標準差參數![]() ,如式(3)所示,f(t)為文中所提兩種脊線方法得到的脊線), 結果如圖5所示,相對圖4中時頻分布自適應短時傅里葉變換獲得的時頻分布能量更加集中。圖 5(a)為基于最大能量峰值(maximumenergypeaks, 簡稱 MEP)的瞬時頻率估計方法做自適應短時傅里葉變換所得時頻分布,由于隨機噪聲干擾,瞬時頻率出現很大的波動;圖5(b)為筆者提出的基于快速路徑優化脊線的自適應短時傅里葉變換所得時頻分布,由于該方法可以有效降低隨機噪聲得干擾,得到的時頻分布較為均勻、集中。為從圖5中提取的瞬時頻率與理論瞬時頻率的比較,從圖6可以看出,基于 FPO的瞬時頻率估計結果更接近于理論瞬時頻率。
,如式(3)所示,f(t)為文中所提兩種脊線方法得到的脊線), 結果如圖5所示,相對圖4中時頻分布自適應短時傅里葉變換獲得的時頻分布能量更加集中。圖 5(a)為基于最大能量峰值(maximumenergypeaks, 簡稱 MEP)的瞬時頻率估計方法做自適應短時傅里葉變換所得時頻分布,由于隨機噪聲干擾,瞬時頻率出現很大的波動;圖5(b)為筆者提出的基于快速路徑優化脊線的自適應短時傅里葉變換所得時頻分布,由于該方法可以有效降低隨機噪聲得干擾,得到的時頻分布較為均勻、集中。為從圖5中提取的瞬時頻率與理論瞬時頻率的比較,從圖6可以看出,基于 FPO的瞬時頻率估計結果更接近于理論瞬時頻率。
文中通過計算范數來衡量脊線的精確程度
其中:fTI為真實脊線頻率;fEI為所提取脊線頻率值。
經計算可得本算法所得脊線誤差為0.0067,而使用 MEP脊線誤差為0.0361,故本算法所提脊線遠比 MEP算法脊線準確。
三、行星齒輪箱故障診斷
行星齒輪箱故障數據:本試驗的振動數據采集自行星齒輪箱故障模擬試驗臺。如圖7所示,試驗臺包括電機驅動、交流電機、行星齒輪箱、固定軸齒輪箱和制動器。轉速傳感器和加速度傳感器分別采集電機軸轉速和行星齒輪箱振動信號,電機軸轉速可由電機驅動自由調節,本試驗中電機為變轉速,包括一段升速和一段減速過程。信號采樣頻率為12800Hz,采集時長16s。
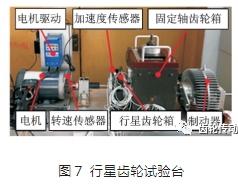
表1給出了行星齒輪箱的齒輪參數。由參考文獻提供的星齒輪箱故障階次計算公式如下
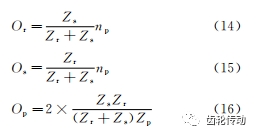
其中:Or,Os 和 Op 分別為齒圈、太陽輪、行星輪故障階次;Zr,Zs 和Zp 分別為齒圈、太陽輪、行星輪齒數;np 為行星輪個數。
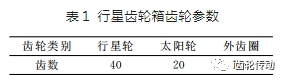
表2為將表1中參數帶入式(14)~(16)計算得到的行星齒輪箱內各零件故障特征階次表。
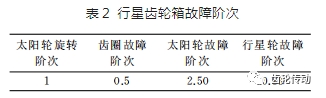
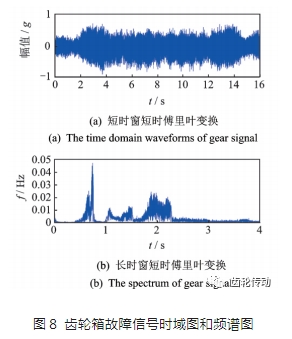
試驗信號分析:通過對含有行星輪裂紋故障的振動信號進行階次分析,從而驗證該方法的有效性。行星齒輪箱故障數據的振動時域圖和頻譜圖如圖8所示。圖8(a)為試驗中直接采集的振動信息時域圖,圖8(b)為時域信號經傅里葉變換得到的頻譜圖,在頻譜中出現了很多峰值,由于齒輪轉速波動,很難將頻譜圖中的峰值與故障特征頻率或者故障特征階次聯系起來。
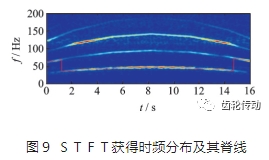
首先,對原始故障信號使用短時傅里葉變換獲得信號的時頻分布,并提取出信號中電機轉速對應的瞬時頻率,如圖9所示,圖中紅線為使用基于快速路徑優化的脊線提取方案獲得的瞬時頻率。
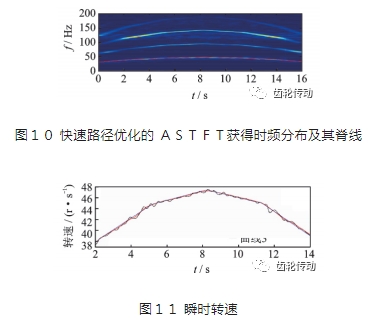
然后,再次對原始故障信號使用筆者提出的基于快速路徑優化的自適應短時傅里葉變換獲得新的時頻分布,并提取出信號中電機轉速對應的瞬時頻率,如圖10所示,圖中紅線為從此時頻分布中提取的瞬時頻率。通過對比,可以看出本方法獲得的時頻分布(見圖10)優于傳統短時傅里葉變換得到的時頻分布(見圖9)。將圖9和圖10中提出的瞬時轉速信息與實際轉速進行對比,如圖11所示,圖中曲線1為使用STFT 得到的轉速;曲線2為本方法得到的轉速;曲線3為實際轉速。可以看出通過本方法獲得的轉速更加接近于真實轉速,可以作為實際轉速未知情況下行星齒輪箱故障信號角度域重采樣的參考轉速。
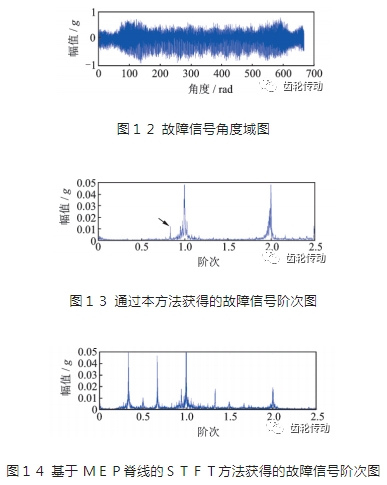
最后,利用獲得的瞬時頻率對故障數據重新進行角度采樣,即將時域信號對轉速進行積分從而得到角度域信號,如圖12所示。然后對故障數據的角度域信號做階次分析得到振動信號的階次圖,如圖13所示。圖中幅值較大的1階為轉頻、2階為2倍轉頻。對應表2可以在圖13階次中找到故障階次,故障階次為0.83階,幅 值 為0.012g,故障階次非常明顯,從而驗證基于快速路徑優化的自適應短時傅里葉變換方法在實際應用中的可行性。同時添 加如下對比,以通過 MEP 方法獲得的參考轉速對信號做階次分析,得到如圖14所示階次圖,從圖中很難判斷出行星齒輪故障階次。
四、結束語
基于快速路徑優化的自適應短時傅里葉變換方法依據快速路徑優化方法獲得的瞬時頻率規律變換時頻窗長度,使自適應短時傅里葉變換能夠獲得更加優化的時頻分布,從而在下一次的脊線提取過程中獲得更加準確的瞬時頻率估計結果。通過對比仿真信號的處理結果,可以清晰地看出在處理瞬時頻率斜率變化較快的信號時,筆者提出的基于快速路徑優化的自適應短時傅里葉變換要優于傳統的短時傅里葉變換方法。通過使用此方法處理取自行星齒輪變速箱的非平穩信號,根據快速路徑優化脊線提取方案獲得的齒輪箱瞬時轉速對原始故障信號重新進行角度采樣,對角度域故障信號做階次分析,得到明顯的特征階次。通過對試驗信號的分析證明了基于快速路徑優化的自適應短時傅里葉變換方法在行星齒輪變速箱故障診斷上的有效性。
參考文獻略.